Neue Produkte vom 07/14/2011
Aktiver Rückholmechanismus
Höhere Präzision bei geringerem Verschleiß
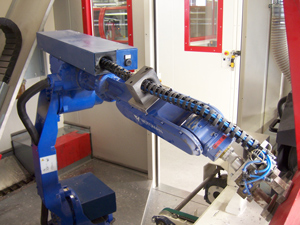 |
| Rückholsystem (Bild: Kabelschlepp GmbH) |
Bei herkömmlichen Energieführungsketten von Robotern kann es zu Überlängen kommen, wenn der Roboterarm nicht bis zu seiner Maximallänge greift. Die Folge ist oft ein höherer Verschleiß an Ketten und Leitungen. Der Energieführungsspezialist Kabelschlepp hat mit der Pull-Back-Unit (PBU) einen aktiven Rückholmechanismus entwickelt, der diese Überlängen vermeidet. Mit definierten Bewegungsabläufen werden so bis zu vierfach höhere Standzeiten der Energieführung erzielt. Der aktive Rückholmechanismus sorgt dafür, dass die Energieführung immer nah am Roboterarm verläuft – auch bei den sehr komplexen Bewegungsabläufen, die in Roboterzellen stattfinden.
Die Pull-Back-Unit für die dreidimensionale Energieführung Robotrax besteht aus einem stabilen, torsionssteifen Gehäuse, das für die einfache Montage am Roboterarm optimiert wurde. Die Rückstellkraft lässt sich flexibel festlegen und so an die Art der verwendeten Leitungen, den Robotertyp und die spezifischen Bewegungsabläufe innerhalb der Anwendung anpassen. Innerhalb des Rückholsystems werden die Kabel definiert und ohne Unterschreitung des Mindestbiegeradius geführt. Je nach Robotertyp werden die dazu erforderlichen Befestigungsbohrungen bereits werksseitig entsprechend der Vorgaben des Roboterherstellers angepasst. Im Inneren des Gehäuses zieht eine Traktionsvorrichtung die Überlänge der Energieführung bei entsprechenden Bewegungen des Roboterarms ein. Zur sicheren Leitungsführung im Gehäuse geht das Ende der Robotrax-Energieführung in eine kurze Kette aus der Uniflex Advanced-Serie über, die innerhalb des Gehäuses verfährt. Dieses Prinzip stellt sicher, dass sich die Länge der Energieführung durch entsprechendes Ein- und Ausrollen jederzeit flexibel an den Bewegungsablauf des Roboters anpasst und so immer direkt am Roboterarm geführt wird. Die Energieführungskette läuft damit stets kontrolliert geführt, ein Anschlagen an den Roboter ist ausgeschlossen.